线下比赛
比赛规则

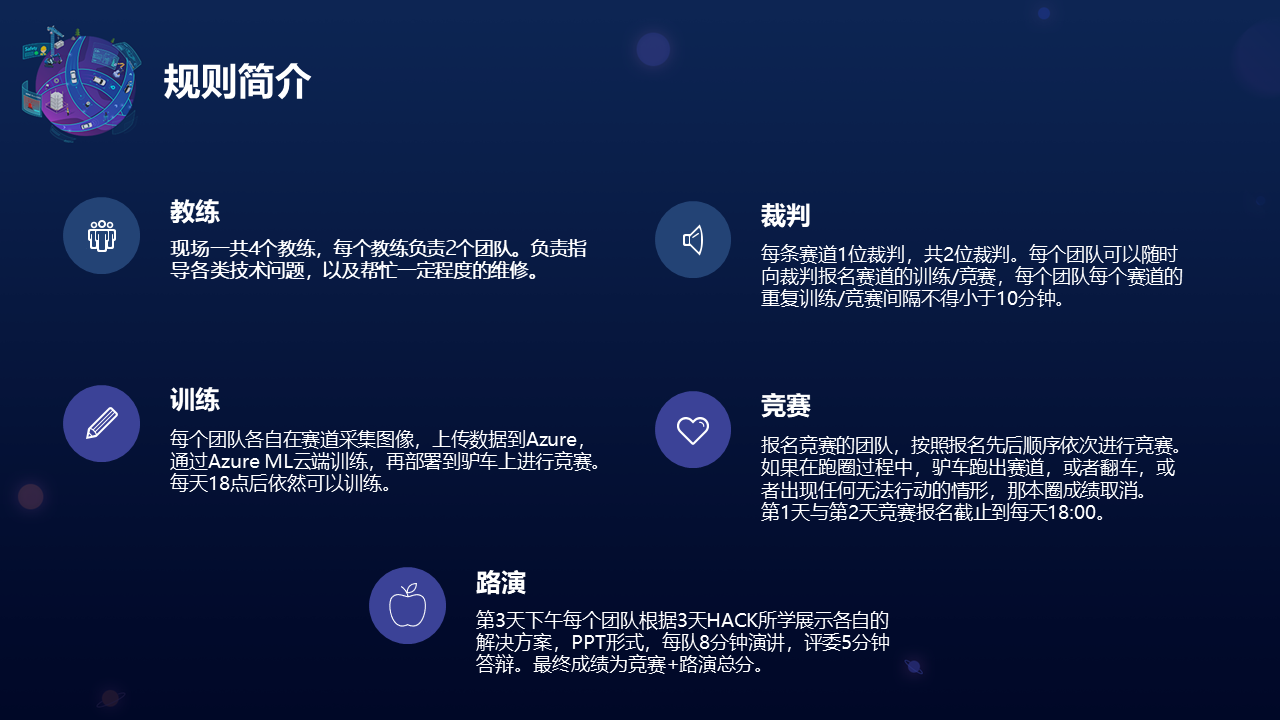

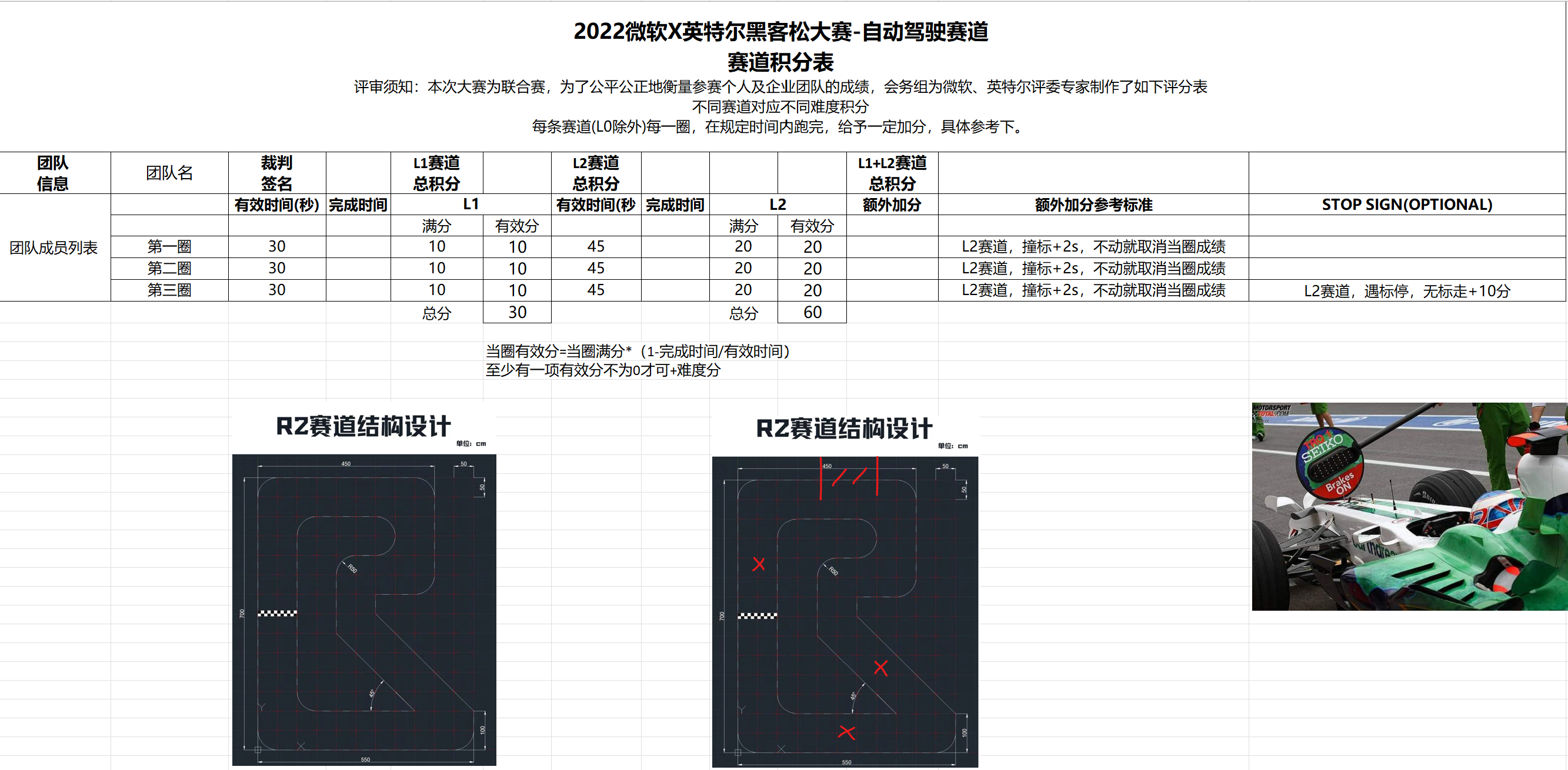
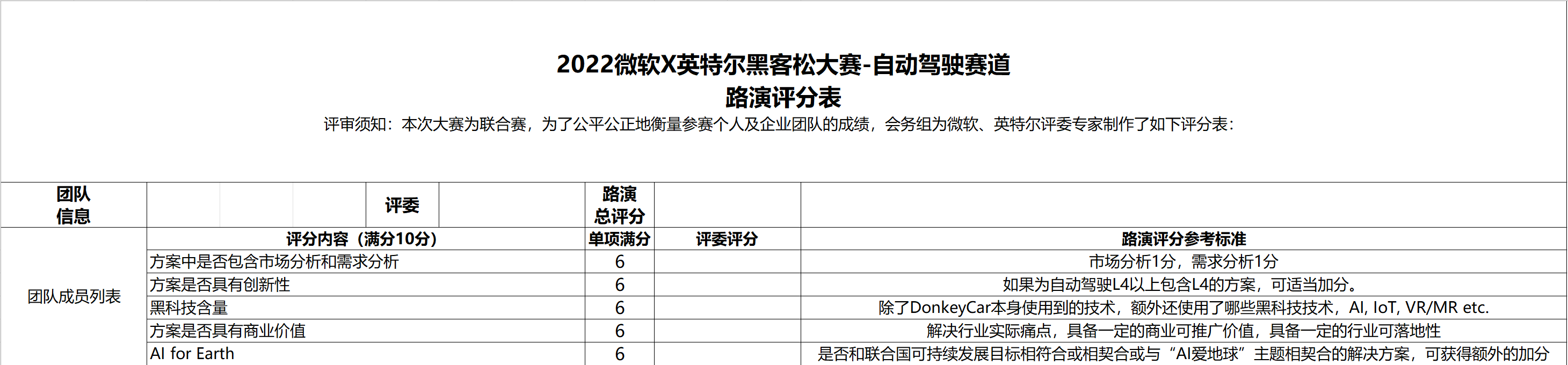
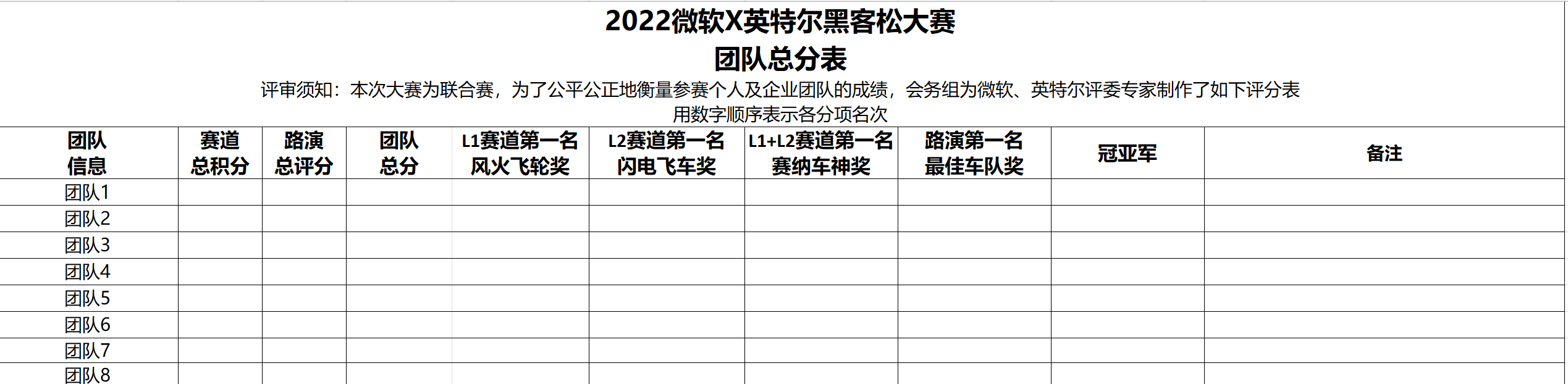
评分规则
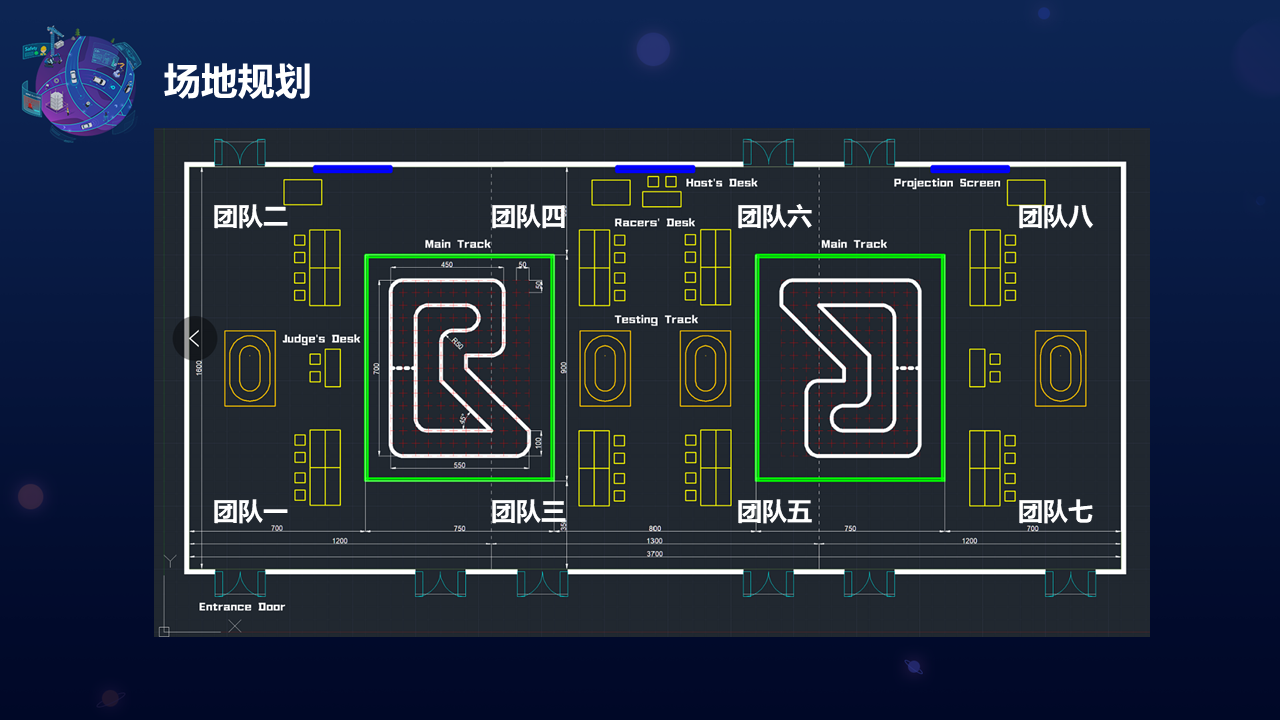
比赛安排

奖项评选
操作流程
一般情况下,驴车安装配置完成后,可通过Wi-Fi连入网络,建议通过远程终端软件登录驴车进行调试.
常见远程登录软件
登录信息
- 用户名:
donkeycar - 密码:
donkeycar - IP地址: 请在比赛现场联网后通过下面命令获取.
hostname -I
或
ifconfig wlan0
驴车项目路径
驴车项目位于/home/donkeycar/projects目录, 请在远程登录系统后,通过cd 命令切换至该目录,并确认当前为(donkey)虚拟环境.
如果当前位于:(base)[donkeycar@donkeycar0X ~]$
此时是conda 基础环境需要切换至驴车环境.
conda activate donkey
如果需要退出虚拟环境:
conda deactivate donkey
启动驴车
操作步骤
在终端输入:
python manage.py drive
或者直接使用下面命令:
gogogo
驴车启动后,终端会被占用,如果需要终止驴车运行请在键盘按下: ctrl + c
网页端控制
默认情况下,驴车在启动后会通过tornado 库实现一个简单的web页面,该页面可用于监控驴车行驶状态及网页端控制,可通过浏览器访问驴车IP 地址及端口来获取.
- 网页端打开
http://驴车当前IP地址:8887 端口
默认端口: 8887 驴车在驾驶过程中,会不断通过摄像头采集图片信息并整合当前的角度和油门值存储在
data目录. 在执行终端中可以通过键盘输入: CTRL + C 结束采集.
压缩打包数据
为上传到Azure 进行云端进行训练,加快训练进程.
cd /home/pi/projects/mycar/
tar -czvf data.tar.gz data/
ls
如果有 data.tar.gz 的红色压缩包就好.
上传云主机
- 通过
scp命令拷贝
scp -P50001 data.tar.gz -i DONKEYCAR_KEY.pem azureuser@AZURE_SERVER_IP:/home/azureuser/mycar/
训练方法
- 通过ssh 命令登陆到Azure云服务器,其中需要使用对应的KEY,和对应的端口登陆,其中部分云主机开放的端口是
50000, 部分是50001, 请根据实际对应的服务器数据添加.
ssh -p 50001 -i /home/donkeycar/hackauto06-gpu.pem azureuser@[Azure GPU Server]
- 进入项目目录并解压采集的数据并在 Azure GPU服务器上训练Keras 模型.
cd mycar
tar -xf data.tar.gz
donkey train --tub data/[TUB_SUB_DATA]/ --model models/[MODEL_NAME].h5
请确认数据包加压到
/home/azureuser/mycar/data目录.
创建Tensorflow 模型路径和 openVINO 模型路径
cd modules
mkdir tf
mkdir ov
训练完成后会在驴车实例的 models 目录中生成模型文件. 由于默认训练出来的模型类型是:keras
需要转换为tensorflow类型,再转换成OpenVINO能识别的类型.
* 转换模型: 将模型从 Keras 转换为 Tensorflow.
cd ..
python convert_keras2tf.py --from models/[MODEL_NAME].h5 --to models/tf/
其中转换脚本convert_keras2tf.py 示例代码:
import tensorflow as tf
import os
import sys
'''
--from: keras mode path .h5 e.g. /PATH/TO/[YOUR_CAR_INSTANCE]/models/[YOUR_MODEL_NAME].h5
--to: converted openvino path to e.g. /PATH/TO/[YOUR_CAR_INSTANCE]/models/[OPENVINO_IR_MODEL_PATH]/
'''
os.environ['TF_XLA_FLAGS'] = '--tf_xla_enable_xla_devices'
if __name__ == '__main__':
args = sys.argv[1:]
if len(args) == 4:
if args[0] == '--from':
model = tf.keras.models.load_model(args[1])
if args[2] == '--to':
tf.saved_model.save(model,args[3])
- 将Tensorflow模型转换成OpenVINO模型.
PS: 这里需要手动添加一个 库: defusedxml
conda install defusedxml
python /opt/intel/openvino_2021/deployment_tools/model_optimizer/mo.py --saved_model_dir models/tf --input_shape [1,120,160,3] -o models/ov --data_type FP16
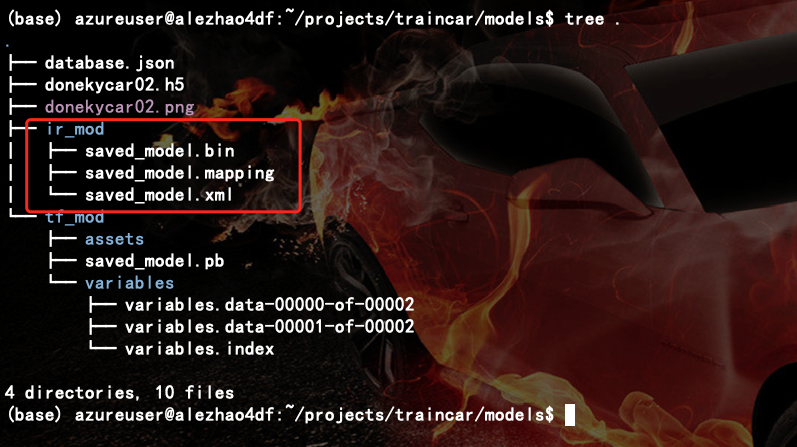
查看一下数据结构:
sudo apt -y install tree
tree .
- 打包压缩OpenVINO模型文件
cd models
tar -czvf ov.tar.gz ov/
- 退出Azure GPU 服务器,回到驴车本地环境中.
exit
注意: 目前需要保证当前环境已经回到 DonkeyCar 环境中.可以通过检查主机名和登陆用户判断
- 从 Azure 云服务器下载 OpenVINO 模型文件并解压.
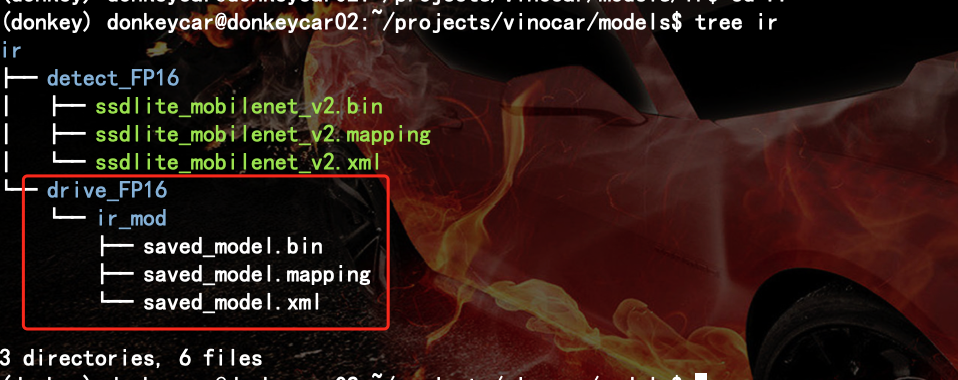
cd projects/vinocar/
scp -P50001 -i /home/donkeycar/hackauto06-gpu.pem azureuser@[Azure GPU Server]:/home/azureuser/mycar/models/ov.tar.gz models/
cd models
tar -xf ov.tar.gz
模型存放位置如下图
自动驾驶
- 网页控制
通过浏览器访问http://驴车当前IP地址:8887/, 替换驴车地址信息为驴车设别地址信息.
先点击页面下方的: start vehicle按钮然后在 Mode & Pilot 选择Full Pilot小车就开始自行驾驶了.
需要终止请在终端上按下 Ctrl + C
此时, 需要开启遥控器的
Channel3按钮(手柄左手大拇指位置) 来解锁油门. 以上所有操作需要在拥有硬件驴车和 azure 云服务器的情况下进行.